
Posted on May 01, 2019
3D scanning is the process of analysing a physical object and creating a digital representation of its dimensions. This is done by using special 3D scanners to collect data from the object. This data and its collection are dependent on several variables including colour, environment, light, textures and size. The collected data is then used to generate digital 3D models computationally. There is an array of 3D scanners available which are based on many different technologies, each with its own limitations, advantages and costs. The most common form of 3D scanners utilizes optic sensors to collect information on how light hits the object being scanned. Software can then use this data and interpret light contrast as depth-perception and render a 3-dimensional copy. The most apparent weaknesses of this scanning type are the optics of the scanners, which struggle to translate reflective or transparent surfaces, as the light refraction differs between these materials. Despite these limitations, the benefits and function of 3D scanning is extensive. The largest benefit is the rendering and creation of these objects without negatively impacting the object itself.
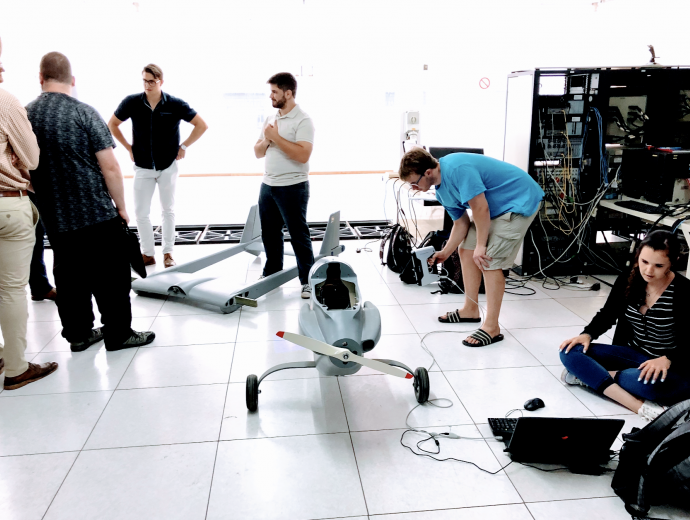
The applications of this technology ranges from reverse engineering to product design as well as research. This is achieved by creating 3D models saved in files for electronic analysis, amendment and review which can be easily distributed. In this regard the Makerspace worked with master’s students in the Department of Mechanical Engineering at the University of Pretoria to apply this technology in an innovative way to assist in design and reverse engineering of specialised aerial equipment. These scans were conducted offsite in the Johannesburg area at an organisation which specialises in Unmanned Aerial Vehicle (UAVs), where the role of the students was to redesign and improve upon and existing model. The Makerspace assisted in the digitisation and creation of the 3D files. The object itself had a matt finish and was in a well-lit environment, ensuring optimal scanning conditions.
To generate these 3D files, an Einscan Pro pack scanner and its proprietary software was used, alongside a high-end laptop to process the several million cloud points created to build the 3D image of the aerial object. This scanner uses “time-of-flight” technology, which is the use of a laser light to probe the object to generate cloud points and produce a 3D file. At the heart of this type of scanner is the range finder. The laser range finder identifies the distance of a surface by timing the round-trip time of a pulse of light in order to define the object and maximize edge resolution and depth-perception. Additionally, the triangulation laser built in to the 3D scanner is used to facilitate ‘object tracking’ which is the process of successfully identifying the subject during scanning. This triangulation laser shines on the subject and makes use of a camera to determine the location of the laser dot. This provides extra information to help the software distinguish between the subject being scanned and its surroundings. Triangulation of the scanner was of great use based on the size of the object to eventually render a completed scan which is being used to render and recreate a better model for the future!
Copyright © University of Pretoria 2025. All rights reserved.
 Virtual Campus
Virtual Campus
Get Social With Us
Download the UP Mobile App